







简析自动化设备应用中的回转驱动齿间隙
发布时间:2024/05/07 企业新闻 浏览次数:4701
我们一直在追求灵活、高性能和更加经济的传动系统
齿轮齿隙是指机械传动系统中齿轮的齿之间存在的间隙,如图 1 所示。由于齿轮间隙会影响精度、效率、噪音、振动、磨损、运动控制、系统复杂性和安全性,因此我们一直在努力将回转驱动中齿轮系统的间隙降至最低。尽管齿间隙的重要性因具体应用场所而异,但我们在设计齿轮式回转驱动的时候,仍需仔细考虑这些因素,确保它们达到所需的性能和安全标准。
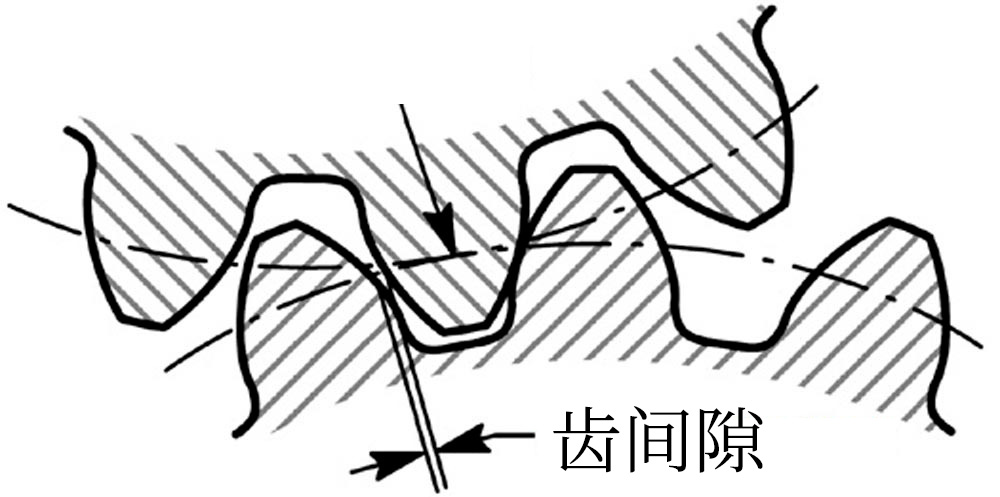
图1:齿间隙示意
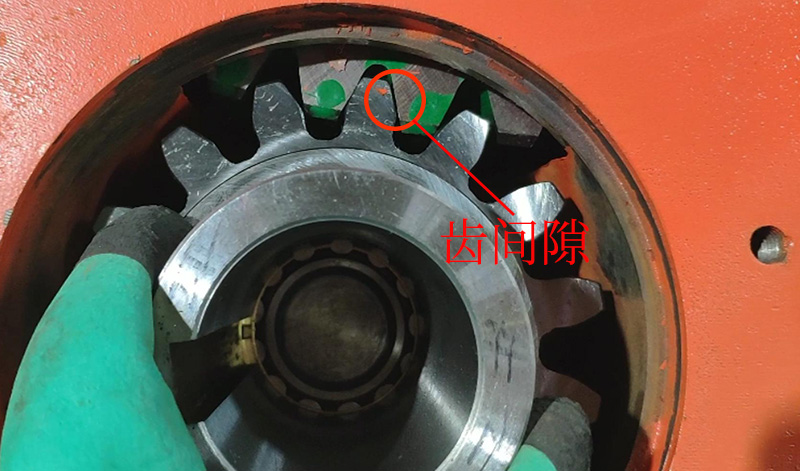
图2:实际应用中的齿间隙
精度和准确性
在工业机器人、数控机床以及自动化生产线设备等高精度应用中,最大限度地减少回转驱动的齿隙至关重要。过大的齿隙会产生定位不准确、重复性的准确度降低等问题,这可能会导致无法生产出公差要求严格的产品。
效率和滞后
扭转刚度和齿隙决定了齿轮在负载和不负载之间的表面接触面积,这种现象被称为滞后。一般来说,滞后是指系统在改变方向时输入和输出之间的滞后。如果制造商无法提供这些滞后曲线,则可使用损失运动和刚度变化作为替代参数来评估齿轮箱的滞后现象。
振荡和振动
回转驱动的反向间隙会导致自动化生产线设备系统出现振荡和振动,尤其是当设备突然改变方向或停止和启动时,这些振动会影响系统的整体稳定性及其处理精细任务的能力。
磨损
随着时间的推移,齿轮间隙会导致回转驱动的齿轮部件磨损加剧,缩短设备的使用寿命,并可能导致维护问题。
控制和制造复杂性
控制算法中的反向间隙补偿很复杂,可能需要额外的传感器和软件来考虑机械间隙。这增加了控制系统的复杂性。此外,追求接近零的反向间隙也增加了设计的复杂性和齿轮式回转驱动的成本。
位置控制
位置控制是一些自动化设备的基本需求,它涉及准确可靠地控制自动化设备某些部件的位置。反向间隙会导致部件应在的位置与实际位置之间出现偏差。在许多自动化设备应用中,精确定位对于成功执行任务至关重要。比如抓取拾放操作、焊接、装配等任务,位置控制不佳会导致任务执行错误。
根据运动方向的不同,齿轮的反向间隙可能会导致输出侧的负载位置不同,从而在运动开始或停止时造成延迟和振荡。首先想到的解决方案是在齿轮输出轴上安装第二个编码器,并将控制建立在双反馈回路的基础上,从而增加复杂性和误差补偿。控制器首先关闭内环,即速度控制环,然后关闭第二个负载位置环,速度控制环路接收来自电机编码器的反馈,该反馈决定适当的速度反馈增益,从而对系统产生阻尼效应,减少振荡。
安全性
安全性是自动化设备的首要问题,准确的位置控制可确保自动化设备在规定的工作空间内运行,避免碰撞或事故。比如,与人一起工作的机器人就需要灵活的位置控制,确保不会对操作员构成安全风险。因此,反向驱动能力(即低阻抗系统)对于从负载侧驱动机械遵从性、管理与人的接触至关重要。
结论
回转驱动中的齿轮反向间隙会导致位置控制环节中出现误差,从而影响自动化设备的机械阻抗、产生噪音、降低效率并引起振动。由于材料、润滑剂和环境条件的磨损,反向间隙范围会随着时间的推移而变化。
上一篇: 齿轮径向跳动对回转驱动有哪些影响?
下一篇: 回转驱动油润滑与脂润滑有什么区别?

